Notice
Recent Posts
Recent Comments
CHOU
[MSRDS] Gripper 작동해 보기(using AX-12) 본문
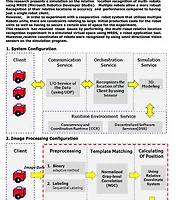
우다야(연구실 인도 친구)가 MSRDS 이용해서 그리퍼 시뮬레이션, 하드웨어를 리얼타임으로 동시에 컨트롤 해보고 싶다고 해서 만들기 귀찮았지만 급조해서 만들었습니다.
모터는 로보티즈(한국 기업)의 AX-12 다이나믹 셀을 홈피에서 다운 받아서 변환했습니다.

우선 간단하게 테스트 할 목적으로 만들었는지라 SPL을 이용해서 뚝딱뚝딱 만들었습니다.
엔티티와 메시 파일이 정확히 매칭이 안되지만 우선 조인트에 대한 테스트 목적으로 만들었으므로
양해해 주시기 바랍니다.
컨트롤은 두 가지 방법으로 테스트가 가능하게 만들었는데..
우선 첫번째는 VPL을 이용해서 뚝딱뚝딱 만들었고
두번째는 C# 소켓 프로그래밍을 이용해서 만들었습니다.
구글신께 널려있는 소켓 소스를 의뢰하고 그중에서 제일 간단한 소스를 약간 응용했습니다.

TCP/IP 통신 할때는 명령어를 <? 명령어 ?> 이런 식으로 날려줘야 인식이 됩니다.
SPL에 테스트 클라이언트가 있어서 그냥 그거보고 만들었다가 왜 안되지 1시간이나 삽질해서
무지 열받았습니다^^. 역시 메뉴얼을 읽는게 중요합니다.
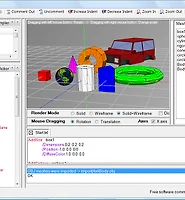
위의 명령어는 간단한게 조인트 되어 있는 Z축을 -45만큼 이동하라!! 뭐 이런 의미 입니다.

명령을 날리면 저런 식으로 조인트 되어있는 부분이 축 회전을 하게 됩니다.
혹시 소스 필요하신 분들은 말씀해 주세요.
인도 친구가 아마 내일 정도에 하드웨어랑 같이 작동되는 프로그램을 만들 예정이니까
그게 완성되면 같이 올리겠습니다.
'Tech/Microsoft Products' Related Articles
more